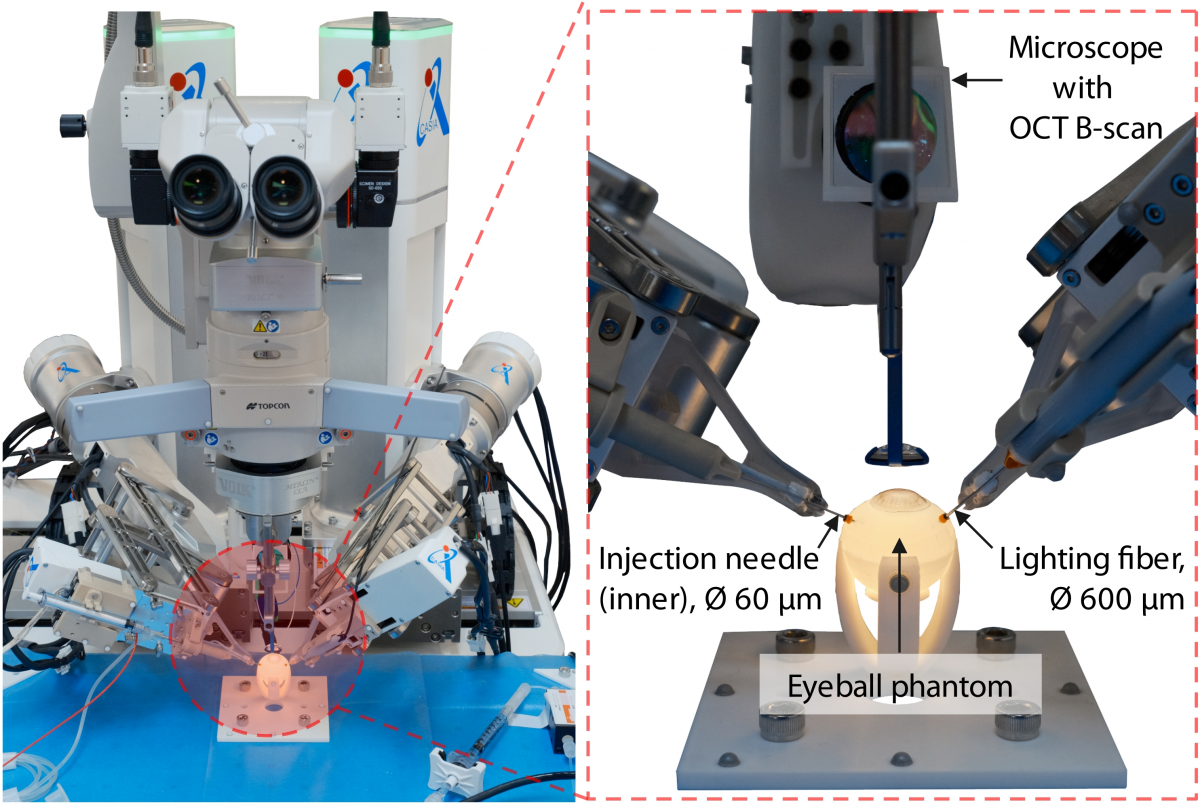
记者从中国科学院自动化研讨所得悉,近来,该研讨所多模态AI体系全国重点试验室边桂彬研讨员课题组成功研宣布一款自主显微眼科手术机器人体系,并验证了临床可行性。
该体系在整个眼内空间可完成自主的视网膜下和血管内打针,可明显提高眼底打针的准确性、安全性和一致性,可辅佐外科医师愈加专心于手术规划和监督使命。相关效果近来在世界学术期刊《科学机器人》宣布。
因为眼睛软组织结构精密、操作空间狭小,医师在眼内手术中的手动操作面临着巨大应战。自主机器人手术体系在眼科手术中的使用能够经过愈加智能、精准的操作操控提高手术安全性,为多种眼科疾病的医治供给新的或许。
研讨团队研制的自主显微眼科手术机器人体系,立异性地构建了从术中三维空间感知、跨标准准确定位到轨道精准操控的中心算法模块:
在三维空间感知方面,提出了一种多视角空间交融办法,有用克服了多模态眼内成像中的成像异质性和动态空间失准问题,构建了术中动态更新的大局三维地图,完成了对眼内区域的全面感知。
在准确定位方面,提出了一种根据原则加权的多传感器数据交融办法,处理了查验测验规模、差错起伏和采样频率的差异,使机器人手术器械顶级在眼内区域完成准确定位。
在轨道操控方面,提出多束缚方针优化办法,对机器人结尾执行器的轨道进行准确规划。
在眼球假体、离体猪眼球及活体动物眼球的视网膜下打针与血管打针试验验证中,该体系均完成了100%的打针成功率。与医师手动手术及医师主从操作机器人手术相比较,均匀定位差错别离减少了79.87%和54.61%,表现出更高的安全性和精准性。
该研讨效果为眼内手术的自主化拓荒了全新的技能途径,不只验证了自主机器人在显微手术中使用的可行性,更有望推进眼科手术医治的智能化、精准化晋级,在长途医疗和极点环境等杂乱场景中展现出宽广的使用潜力。
重庆市万州区住宅和城乡建造委员会 关于核准关于核准重庆华兰福劳务有限公司 等5家建筑业企业资质的
本文内容由外部供稿方提供,由于信息的复杂性与时效性,本网站不能够确保所有信息的绝对准确与完整,读
4月27日,深交所官网显示,深圳市越疆科技股份有限公司(简称“越疆科技”)的创业板IPO申请已获
香港教育大学(教大)与清华大学(清华)近来于北京清华大学合办“2026未来教育与学习论坛”,评论
4月24日,当千年工艺遇见现代智造,当大师匠心驶入车展舞台。由中国工艺美术协会、中国机械工业联合
中心政法委秘书长、全国扫黑办主任陈一新在发布会上表明,到3月31日,全国扫黑除恶专项斗争告发信箱
原标题:中国联通智能网联汽车服务平台全球版上线中国联通车联网大会以“智领未来 亿启新程”为主题在
近日,第十三届“书香三八”阅读盛典中,鼎和保险河北分公司作品获“表演阅读优秀奖”。 “
